Sensor Fusion Techniques in Autonomous Vehicle Navigation: Delving into various methodologies and their effectiveness
The concept of sensor fusion
Sensor fusion is the process of merging data from various sensors or sources to create information that is more accurate and reliable than what could be obtained from any of the individual sources alone. RADAR, LiDAR, camera, and ultrasonic sensors are used in the sensor fusion process to interpret surrounding conditions and enhance the detection process's certainty. Generally, it is not possible for a single sensor to work independently and provide all the necessary information to an autonomous system to make a decision or take any action. Relying on information delivered by a single source makes the operation of an autonomous system highly risky, and in complex contexts, the sensor fusion process comes in handy and ensures a greater level of safety.
How does an autonomous vehicle perceive the world?
An autonomous vehicle perceives our world through a sophisticated lens of technologies and processes that mimic and extend human perception capabilities. This process involves a series of steps:
1. Sensing the Environment
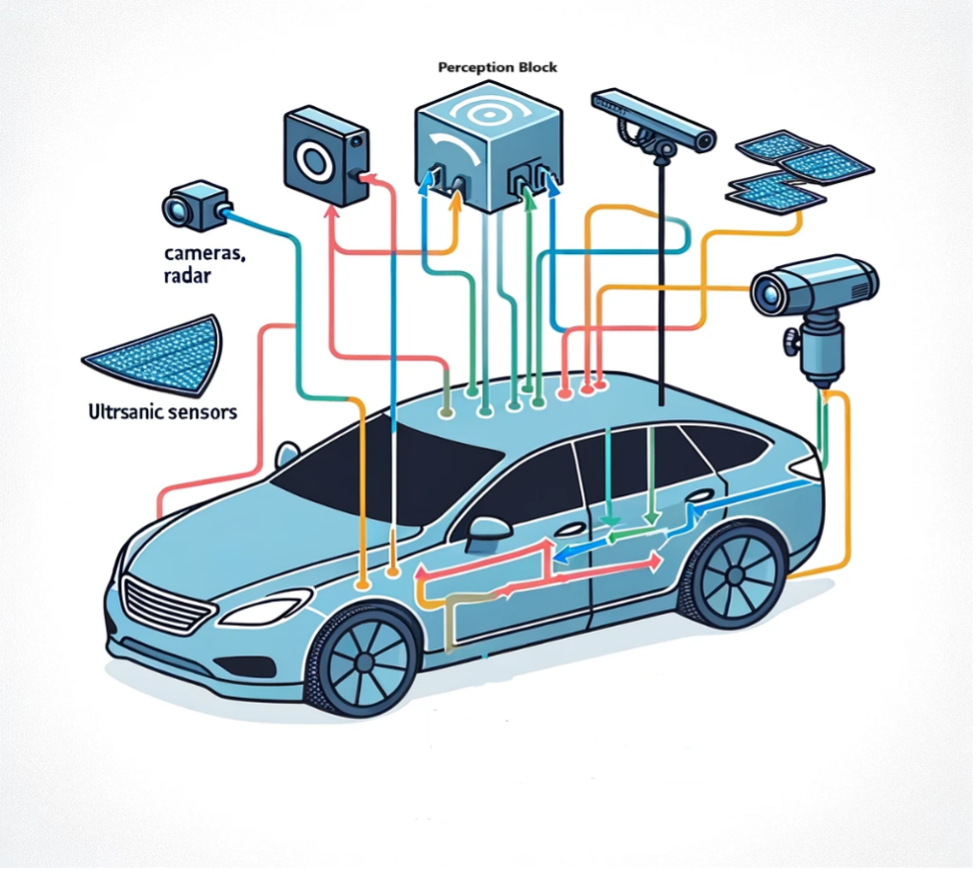
The first step in an autonomous vehicle’s perception of the world is through its array of sensors. Cameras, LiDAR (Light Detection and Ranging), and RADAR (Radio Detection and Ranging) are strategically mounted on the vehicle to capture a wide range of data about its surroundings. Cameras provide visual imagery, LiDAR measures distances using laser light, and RADAR detects objects and their speed, even under conditions of poor visibility. Figure 1 graphically represents how an autonomous vehicle uses the sensor fusion process to sense the environment using the sensor fusion process.

2. Data Processing in the Perception Block
Once the raw data is gathered, it enters the perception block of the vehicle’s system. Here, the data from various sensors is combined and processed, Figure 2. This sensor fusion process enhances the accuracy and completes the vehicle’s understanding of its environment. It reduces the uncertainty inherent in relying on a single sensor and helps in creating a coherent picture of the surroundings.
3. Machine Learning Functions in Autonomous Driving
Detect: The vehicle uses its sensors to detect critical elements of its environment. This includes identifying free driving space, spotting obstructions, and making future predictions about these elements.
Segment: The detected data points are then segmented. Here, similar points are clustered to identify distinct categories such as pedestrians, road lands, traffic signs, and other vehicles.
Classify: In this stage, the segmented categories are classified. The system determines which objects are relevant and which can be disregarded for safe navigation. For example, it identifies spaces on the road that are safe to drive through while avoiding potential hazards.
Monitor: A self-driving car also continuously monitors all of these classified objects. The vehicle constantly updates its understanding of the surroundings to predict and react to changes, ensuring a safe journey.
4. Behavior and Path Planning
An autonomous vehicle utilizes the processed information from the perception block to make behavior planning as well as to devise both short and long-range paths. This involves deciding on maneuvers like lane changes, turns, and speed adjustments based on current and predicted environmental conditions.
5. Control Module
Finally, the control module takes over. It ensures that the vehicle adheres to the planned path. It sends precise control commands to various parts of the vehicle, such as the steering, acceleration, and braking system, to follow the path safely and efficiently.
An autonomous vehicle understands the world through a complex, integrated system that constantly gathers and interprets data, makes informed decisions based on this data, and executes these decisions to navigate safely. This process is a sophisticated emulation of human sensory and cognitive functions, enhanced by the speed and accuracy of sensor fusion technologies.
Current trends of sensor fusion methodologies in autonomous vehicle navigation
1. 3D object detection using sensor fusion
The world of autonomous vehicle systems using LiDAR sensors in conjunction with cameras is gaining prominence. This combination presents an optimal solution in terms of system complexity and coverage. Cameras provide essential visual information, capturing details of the surroundings, including road signs, lane markings, and traffic conditions. LiDAR, on the other hand, excels in detecting objects and measuring distances with high precision through its 3D point cloud data. The fusion of these two types of data — the image data from cameras and the 3D point cloud data from LiDAR — results in a comprehensive understanding of the vehicle environment. A key application of this fusion is in creating 3D box hypotheses around detected objects, along with associated confidence levels. One innovative approach in this area is the PointFusion network. This method demonstrates how effectively combining camera and LiDAR data can enhance 3D object detection capabilities in autonomous vehicles.
The integration of neural networks in sensor fusion for autonomous vehicles represents a cutting-edge development. Modern approaches involve the initial processing of each sensor’s signal through separate neural networks. This strategy ensures that the unique characteristics of each sensor’s data are preserved and accurately interpreted. These individual networks' outputs are combined into a higher-level neural network following this low-level processing. This method of high-level fusion reaps several benefits. Firstly, it minimizes the loss of critical information that might occur if the sensor data were combined prematurely. Each sensor’s output is thoroughly analyzed before fusion, ensuring a more robust and accurate overall representation.
Secondly, this approach aligns with the current trend in neural network development, emphasizing the efficiency of smaller, more specialized neural networks. The philosophy of “small neural nets are beautiful” highlights a move toward more streamlined yet powerful neural networks that can efficiently process complex sensor data. This advanced neural network strategy in sensor fusion enhances the accuracy of object detection and environmental perception in autonomous vehicles and offers a scalable and conceptually simpler solution. It indicates a significant step forward in the development of smarter, more reliable autonomous driving systems.
2. Sensor Fusion for Occupancy Grid Mapping
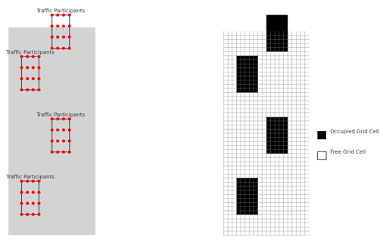
Occupancy grid mapping is a crucial technique used in the navigation and localization of autonomous vehicles, especially in dynamic and complex environments. This method involves creating a grid-based representation of the environment, where each cell in the grid indicates whether a particular area is occupied, free, or unknown. Refer to Figure 3 to visualize the grid mapping process of an autonomous car. Sensor fusion, combining data from cameras and LiDAR, plays a pivotal role in achieving this.
The strength of using both cameras and LiDAR for occupancy grid mapping lies in the complementary nature of the data they provide. Cameras are adept at capturing high-level 2D information, such as color, intensity, texture, and edge details, which are crucial for understanding the visual aspects of the environment. LiDAR, with its ability to generate 3D point cloud data, provides precise information about the distance and shape of objects, which is essential for understanding the spatial layout of the environment8.
Conventionally, occupancy grid mapping involves processing each cell in the grid independently to determine its status (occupied, free, or unknown). However, newer trends in this field are exploring more sophisticated approaches. One such approach is the integration of super-pixels into the grid map. Super-pixels are clusters of pixels in an image that share similar characteristics. Applying this concept to occupancy grid mapping makes it possible to represent the presence of obstacles accurately. Instead of treating each grid cell in isolation, groups of cells that likely represent the same object or feature are processed together. This technique can enhance the accuracy of the grid map, particularly in identifying and characterizing obstacles.
This advanced approach to sensor fusion and occupancy grid mapping increases the precision of the vehicle’s understanding of its environment and paves the way for more efficient navigation and localization in diverse and ever-changing surroundings. It signifies a move towards more integrated and intelligent systems in autonomous vehicle technology, where the fusion of data leads to a richer and more nuanced understanding of the world.
3. Sensor Fusion for Moving Object Detection and Tracking
Moving object detection and tracking is one of autonomous vehicles' most intricate and crucial tasks. The reliability and performance of solutions in this area are paramount for safe and efficient autonomous driving. To tackle this challenge, autonomous vehicles typically employ a comprehensive sensor suite, each contributing unique and valuable data. Historically, moving object detection and tracking focused on fusing sensor data and integrating it with insights from a Simultaneous Localization and Mapping (SLAM) system. This method aimed to create a comprehensive perception of the environment by combining data at the track level.
Recent advancements, however, have shifted towards more nuanced fusion strategies. One such strategy involves initial detection using RADAR and LiDAR data, followed by funneling regions of interest from LiDAR point clouds into camera-based classifiers. This approach allows for a more layered understanding of the environment, where each sensor’s strengths are maximized. In this context, sensor fusion is often categorized into low-level and high-level processes. Low-level fusion typically handles the preliminary merging of RADAR and LiDAR data, focusing on aspects like localization and mapping without delving into detailed feature extraction or object identification. High-level fusion, on the other hand, incorporates camera inputs, bringing detailed detection and classification into the mix. This hierarchical fusion approach is gaining traction as a trend in autonomous vehicle perception systems.
The efficiency of the tracking system has been enhanced by incorporating vision-based object class and shape information. For example, the tracking system can dynamically switch between point models and 3D box models based on the object’s distance from the vehicle. This adaptability underscores the critical role of camera data in detection and effective localization and tracking. Moreover, this domain currently focuses on harnessing contextual information about urban traffic environments. This involves analyzing patterns and typical behaviors in these settings to refine the tracking system’s capabilities further, leading to more accurate and reliable autonomous navigation.
How effective are sensor fusion technologies in road safety?
The effectiveness of sensor fusion technologies in road safety, particularly within the autonomous vehicle (AV) sector, is a topic of increasing importance as this technology continues to evolve and become more widespread. While autonomous vehicles aim to reduce accidents, the journey towards achieving a lower accident rate than conventional vehicles is still ongoing. However, it’s important to note that accidents involving self-driving cars tend to result in fewer severe injuries.
Looking at specific incidents, Waymo’s self-driving cars, over a 20-month period, were involved in 18 accidents while driving 6.1 million autonomous miles. Most of these incidents were attributed to errors by pedestrians or human drivers, not the autonomous sensor fusion systems themselves. Tesla’s self-driving vehicles have also been under scrutiny, with several accidents reported over the past few years, including fatalities. In some cases, it has been reported that the Autopilot feature failed to recognize certain obstacles, leading to accidents. In one incident, the car failed to distinguish the edges of a white truck against a bright sky, resulting in a fatal crash. The incident underlines the fact that while sensor fusion and autonomous technologies have advanced, they are not infallible.
The overall safety statistics for autonomous vehicles show a mixed picture. On the one hand, self-driving cars have a lower accident rate compared to conventional cars, with 4.7 accidents per million miles driven. This suggests that autonomous vehicles generally perform better in terms of safety. On the other hand, these vehicles are more likely to be involved in crashes compared to manually operated vehicles, although these accidents often occur at lower speeds, thereby reducing the severity of the outcomes.
From a broader perspective, the Insurance Institute for Highway Safety suggests that AVs could prevent about one-third of all car accidents. However, autonomous vehicles still struggle with complex driving situations and can experience issues like system disengagements that require immediate driver intervention. This underscores the complexity of fully integrating AVs into daily traffic and the importance of continued advancements and testing.
In terms of public perception, a significant portion of the population still expresses discomfort or safety concerns regarding riding in driverless cars. This indicates a need for continued improvements in technology and more transparency and education about how these sensor fusion systems operate and their safety features.
The future of sensor fusion in autonomous vehicle
The future of sensor fusion in autonomous vehicles (AVs) is geared toward enhancing safety and efficiency in transportation. As the AV market grows, there is a focus on improving the technical performance and capabilities of various sensors like vision cameras, LiDAR, and RADAR, which are fundamental to an AV’s ability to perceive its surroundings. Despite significant advancements, challenges exist, such as sensor failure due to hardware defects or environmental conditions. The solution lies in integrating multiple complementary sensors to overcome the limitations of individual sensors when operating independently.
One key area of development in sensor fusion is the balance between edge computing capabilities and sensor fusion. Edge computing enables data processing near or at the source of information (the sensor itself) rather than relaying the information to a central processor. This reduces latency and enables close to real-time processing. The more edge computing sensors a car has, the better it can respond in real-time. However, this also increases the cost and complexity of the system. The challenge for tech providers and automakers is to manage the cost and performance tradeoffs between these technologies while ensuring long-term maintenance and servicing of the software over the vehicle’s lifespan.
Autonomous vehicle manufacturers are also focusing on improving the adaptability of software frameworks, which is crucial for integrating advanced technologies like satellite technology and vehicle-to-vehicle communication. This integration is essential for navigating dense roadways and making split-second decisions, such as avoiding collisions with pedestrians or other vehicles. Future research in sensor fusion for AVs includes developing new algorithms for consistent environmental context detection, primarily based on vision but aided by GNSS indicators for navigation adaptation. This multi-sensor fusion approach aims to enhance obstacle detection and overall vehicle safety.
In summary, the advancements in sensor fusion technologies for autonomous vehicles mark a significant leap towards safer, more efficient, and more reliable transportation. The integration of diverse sensors offers a multi-faced view of the vehicular environment that far surpasses human capabilities. This technological partnership enhances the precision of obstacle detection and decision-making in real time and significantly mitigates the limitations inherent in individual sensor technologies. Therefore, it is logical and forward-thinking for audiences, industry stakeholders, and regulatory bodies to place their trust in sensor fusion technologies for the navigational purposes of autonomous vehicles.
References
- Aptiv, “What Is Sensor Fusion?”, Aptiv, March 03, 2020. [Online]. Available: https://www.aptiv.com/newsroom/article/what-is-sensor-fusion.
- D. J. Yeong, G. Velasco-Hernandez, J. Barry, and J. Walsh, “Sensor and Sensor Fusion Technology in autonomous vehicles: A Review,” Sensors, vol. 21, no. 6, p. 2140, 2021. doi:10.3390/s21062140
- N. Cvijetic, “Perceiving with Confidence: How AI Improves Radar Perception for Autonomous Vehicles,” NVIDIA Blog, Apr. 28, 2021. [Online]. Available: https://www.carrushome.com/en/perceiving-with-confidence-how-ai-improves-radar-perception-for-autonomous-vehicles/
- M. Baczmanski, M. Wasala, and T. Kryjak, “Implementation of a perception system for autonomous vehicles using a detection-segmentation network in SoC FPGA,” Ar5iv.org, 2023. [Online]. Available: https://ar5iv.org/html/2307.08682.
- K. Pal, P. Yadav, and N. Katal, “RoadSegNet: A deep learning framework for autonomous urban road detection,” Journal of Engineering and Applied Science, vol. 69, no. 1, 2022. doi:10.1186/s44147–022–00162–9
- Y. Kou and C. Ma, “Dual-objective intelligent vehicle lane changing trajectory planning based on polynomial optimization,” Physica A: Statistical Mechanics and its Applications, vol. 617, p. 128665, 2023. doi:10.1016/j.physa.2023.128665
- C. Thomson, “Lidar vs point clouds: Learn the basics of laser scanning, 3D surveys and reality capture,” Vercator, https://info.vercator.com/blog/lidar-vs-point-clouds
- V. Poliyapram, W. Wang, and R. Nakamura, “A point-wise lidar and Image Multimodal Fusion Network (PMNet) for Aerial Point Cloud 3D semantic segmentation,” Remote Sensing, vol. 11, no. 24, p. 2961, 2019. doi:10.3390/rs11242961
- D. Sharma, A. Kumar, N. Tyagi, S. S. Chavan, and S. M. Gangadharan, “Towards intelligent industrial systems: A comprehensive survey of sensor fusion techniques in Iiot,” Measurement: Sensors, p. 100944, 2023. doi:10.1016/j.measen.2023.100944
- P. G. Mousouliotis and L. P. Petrou, “CNN-Grinder: From algorithmic to high-level synthesis descriptions of cnns for low-end-low-cost FPGA socs,” Microprocessors and Microsystems, vol. 73, p. 102990, 2020. doi:10.1016/j.micpro.2020.102990
- J. Kocić, N. Jovičić and V. Drndarević, “Sensors and Sensor Fusion in Autonomous Vehicles,” 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 2018, pp. 420–425, doi: 10.1109/TELFOR.2018.8612054.
- B. Sasmal and K. G. Dhal, “A survey on the utilization of Superpixel image for clustering based image segmentation,” Multimedia Tools and Applications, vol. 82, no. 23, pp. 35493–35555, 2023. doi:10.1007/s11042–023–14861–9
- H. Lim, “Introduction to SLAM (simultaneous localization and mapping),” Ouster, https://ouster.com/insights/blog/introduction-to-slam-simultaneous-localization-and-mapping
- Y. Li et al., “Deep Learning for LiDAR Point Clouds in Autonomous Driving: A Review,” in IEEE Transactions on Neural Networks and Learning Systems, vol. 32, no. 8, pp. 3412–3432, Aug. 2021, doi: 10.1109/TNNLS.2020.3015992.
- V. Poliyapram, W. Wang, and R. Nakamura, “A point-wise lidar and Image Multimodal Fusion Network (PMNet) for Aerial Point Cloud 3D semantic segmentation,” Remote Sensing, vol. 11, no. 24, p. 2961, 2019. doi:10.3390/rs11242961
- C. Law, “The dangers of driverless cars,” Legal News & Business Law News, https://www.natlawreview.com/article/dangers-driverless-cars
- D. Milenkovic, “24 self-driving car statistics & facts,” Carsurance, https://carsurance.net/insights/self-driving-car-statistics/
- [1] F. Siddiqui and J. B. Merrill, “Tesla ‘autopilot’ crashes and fatalities surge, despite Musk’s claims …,” The Washington Post, https://www.washingtonpost.com/technology/2023/06/10/tesla-autopilot-crashes-elon-musk/
- [1] L. Castillo, “Driverless car accident statistics and trends in 2023 • Gitnux,” GITNUX, https://gitnux.org/driverless-car-accident-statistics/
- “Driverless car accident death statistics to 2023,” Ehline Law Firm Personal Injury Attorneys, APLC, https://ehlinelaw.com/blog/driverless-car-accident-death-statistics-to-2023
- “Self-driving car accident statistics,” Kisling, Nestico & Redick, https://www.knrlegal.com/car-accident-lawyer/self-driving-car-accident-statistics/
- C. Clark, “Future of automotive sensor fusion & data handling: Synopsys blog,” Future of Automotive Sensor Fusion & Data Handling | Synopsys Blog, https://www.synopsys.com/blogs/chip-design/future-of-auto-sensor-fusion-data-handling.html
- “1.7 GNSS-aided inertial navigation system (GNSS/INS),” Learn how a GNSS-Aided Inertial Navigation System (GNSS/INS) works · VectorNav, https://www.vectornav.com/resources/inertial-navigation-primer/theory-of-operation/theory-gpsins
